Autocamera: oog voor autonoom rijden
Op auto's gemonteerde camera's staan bekend als de "ogen van autonoom rijden" en vormen de belangrijkste detectieapparatuur in het ADAS-systeem en het autonoom rijden in de auto.De belangrijkste functie van het verzamelen van beeldinformatie is via de lens en beeldsensoren, die een visuele waarneming van 360 ° kunnen bereiken en de tekortkomingen van radar bij objectherkenning kunnen compenseren.Het is de sensor die het menselijk zicht het dichtst benadert.
Op auto's gemonteerde camera's worden veel gebruikt in de automobielsector, en breiden zich geleidelijk uit van vroeg gebruik voor rij-opname, reverse imaging en parkeeromgevingsweergave tot intelligente cockpitgedragsherkenning en ADAS-ondersteund rijden, met steeds diversere toepassingsscenario's.
Het huidige CR3-percentage van de wereldwijde autocamera-industrie bedraagt 41%, waarbij de tien grootste bedrijven 96% van het marktaandeel innemen.De concentratie van de mondiale autocamera-industrie ligt op een hoog niveau.
Het Highway Loss Data Institute (HLDI) voorspelt dat in 2030 bijna 50% van de auto's zal zijn uitgerust met ADAS-technologie.
Volgens ICVTank zal de omvang van de Chinese autocamera-industrie in 2025 naar verwachting 23 miljard bedragen, met een CAGR van 30% in de komende vijf jaar;De wereldwijde autocameramarkt zal naar verwachting groeien van $11,2 miljard in 2019 naar $27 miljard in 2025, met een CAGR over vijf jaar van 15,8%.
Automatisch rijden omvat perceptie, oordeel en uitvoering, en perceptie is de bron van het hele proces en een belangrijke module van het automatische aandrijfsysteem.Tijdens het rijproces van het voertuig verzamelt het waarnemingssysteem in realtime de informatie van de omgeving via sensoren, wat gelijkwaardig is aan de "ogen" van een autonoom voertuig, en kan het voertuig helpen een observatievermogen te bereiken dat vergelijkbaar is met dat van een menselijke bestuurder.
Bij autonome voertuigen bestaat het waarnemingssysteem voornamelijk uit sensoren zoals camera’s, millimetergolfradars en LiDAR (optioneel, vooral uit angst afgeleid te worden).Als belangrijkste sensor voor omgevingsperceptie speelt de camera een zeer belangrijke rol bij het bereiken van een alomvattende visuele perceptie van 360 °, ter compensatie van de tekortkomingen van radar bij objectherkenning, en is hij de sensor die het dichtst bij het menselijk zicht staat.Daarom zijn camera's in auto's een van de belangrijkste apparaten op het gebied van autonoom rijden.
Wat is een autocamera?
De belangrijkste hardwarestructuur van in de auto gemonteerde camera's omvat optische lenzen (inclusief optische lenzen, filters, beschermende films, enz.), beeldsensoren, beeldsignaalprocessors (ISP), serializers, connectoren en andere componenten.Het schematische diagram van de structuur wordt weergegeven in de figuur:
Anatomie van in de auto gemonteerde cameramodule
De bovenstaande afbeelding toont de anatomie van cameramodules die vaak in auto's worden gebruikt.Naast de buitenste aluminium behuizing, afdichtring en lens is er eigenlijk een relatief eenvoudig ontwerp van meerdere lagen in het midden, meestal inclusief het sensorbord van de sensor, het kleine bord van de beeldprocessor en het bord van een serialisator.De reden waarom een serialisator nodig is, is omdat de beeldgegevensuitvoerbus van camerasensoren of ISP's doorgaans standaard is en wordt gekenmerkt door snelle traversal, maar de transmissiebusafstand kort is, anders kan de integriteit van het signaal niet worden gegarandeerd.
Dus op het voertuig moeten we het omzetten naar hogesnelheidsbusstandaarden zoals GMSL die geschikt zijn voor transmissie over lange afstanden op het voertuig, dus de cameramodule wordt meestal via een serieel bord naar de bus geconverteerd.Bovendien kunnen coaxkabels worden gebruikt om modules van stroom te voorzien en beeldgegevens te verzenden.
Optische lens: verantwoordelijk voor het scherpstellen van licht en het projecteren van objecten in het gezichtsveld op het oppervlak van het beeldmedium.Afhankelijk van de vereisten van het beeldeffect kunnen meerdere lagen optische lenzen vereist zijn.Filters kunnen lichtbanden filteren die niet zichtbaar zijn voor het menselijk oog, waardoor alleen de zichtbare lichtbanden van het daadwerkelijke landschap binnen het gezichtsveld van het menselijk oog achterblijven.
Beeldsensor: Beeldsensoren kunnen de foto-elektrische conversiefunctie van foto-elektrische apparaten gebruiken om het lichtbeeld op het lichtgevoelige oppervlak om te zetten in een elektrisch signaal dat evenredig is aan het lichtbeeld.Het is hoofdzakelijk verdeeld in twee typen: CCD en CMOS.
ISP-beeldsignaalprocessor: gebruikt voornamelijk de hardwarestructuur om de RAW-formaatgegevens van de beeld- en videobroninvoer door de beeldsensor voor te verwerken, die kunnen worden geconverteerd naar YCbCr en andere formaten.Het kan ook verschillende taken uitvoeren, zoals beeldschalen, automatische belichting, automatische witbalans en automatische scherpstelling.
Serializer: Het brengt verwerkte beeldgegevens over en kan worden gebruikt om verschillende soorten beeldgegevens over te dragen, zoals RGB en YUV.
Connector: wordt gebruikt om een vaste camera aan te sluiten.
Op auto's gemonteerde camera's stellen ook hogere productieprocessen en betrouwbaarheidseisen dan industriële en commerciële camera's.Omdat auto's lange tijd in zware omstandigheden moeten werken, moeten op auto's gemonteerde camera's stabiel kunnen werken in complexe werkomstandigheden zoals hoge en lage temperaturen, sterke trillingen en hoge luchtvochtigheid en hitte.De belangrijkste vereisten voor procesproductie zijn als volgt:
Procesvereisten voor op auto's gemonteerde camera's
Bestand tegen hoge temperaturen: de in de auto gemonteerde camera moet normaal kunnen werken binnen het bereik van -40 ℃ tot 85 ℃ en zich kunnen aanpassen aan drastische temperatuurveranderingen;
Seismische weerstand: Voertuigen kunnen sterke trillingen genereren tijdens het rijden op oneffen wegen, dus de ingebouwde camera moet bestand zijn tegen verschillende intensiteiten van trillingen;
Anti-magnetisch: Wanneer het voertuig start, genereert het extreem hoge elektromagnetische pulsen, waarvoor een extreem hoge anti-magnetic nodig isprestatie;
Waterdicht: De camera moet goed worden afgesloten om normaal gebruik te garanderen, zelfs nadat deze enkele dagen in regenwater is geweekt;
Levensduur: De levensduur moet minimaal 8-10 jaar zijn om aan de eisen te voldoen;
Ultragroothoek: de zijaanzicht-surroundcamera moet ultragroothoek zijn, met een horizontale kijkhoek van 135 °;
Hoge dynamiek: het voertuig rijdt met hoge snelheid en de lichtomgeving waarmee de camera wordt geconfronteerd, verandert dramatisch en vaak, waardoor de CMOS van de camera hoge dynamische eigenschappen moet hebben;
Weinig ruis: Het kan ruis effectief onderdrukken bij weinig licht, waarbij vooral zij- en achteruitkijkcamera's nodig zijn om beelden zelfs 's nachts duidelijk vast te leggen.
Belangrijkste parameters van de intelligente camerakop in het voertuig
Detectie afstand
Horizontale gezichtshoek
Verticale gezichtshoek
Resolutie - Wanneer de camera gelijkmatig verdeelde zwarte en witte strepen vastlegt, het maximale aantal lijnen dat op de monitor kan worden gezien (hoger dan de resolutie van de camera).Wanneer het aantal lijnen dit overschrijdt, is er alleen nog een grijs gebied op het scherm te zien en zijn er geen zwarte en witte strepen meer te onderscheiden.
Minimale verlichting - verwijst naar de gevoeligheid van de beeldsensor voor omgevingslicht, of het donkerste licht dat nodig is voor normale beeldvorming door de beeldsensor.Het is de verlichtingssterkte van de scène wanneer het videosignaalniveau van de camera lager is dan de helft van de maximale amplitude van het standaardsignaal wanneer de verlichting van het onderwerp geleidelijk afneemt.
Signaal-ruisverhouding - de verhouding tussen de uitgangssignaalspanning en de gelijktijdige uitgangsruisspanning;
Dynamisch bereik - Het bereik waarbinnen de helderheidswaarden van de helderste en donkerste objecten binnen hetzelfde frame vastgelegd door de camera details normaal kunnen weergeven.Hoe groter het dynamisch bereik, hoe groter de mate waarin objecten die te licht of te donker zijn normaal op hetzelfde scherm kunnen worden weergegeven.
Wat zijn de voordelen ten opzichte van radartechnologie
1) Vergeleken met millimetergolfradar zijn de belangrijkste voordelen van de huidige camera's:
Doelherkenning en classificatie - Momenteel kan de gewone 3D-millimetergolfradar alleen detecteren of er obstakels in de buurt zijn, en kan de omvang en categorie van obstakels niet nauwkeurig identificeren;Denk hierbij aan diverse vormen van rijstrookherkenning, verkeerslichtherkenning en verkeersbordherkenning;
Detectie van begaanbare ruimte, het verdelen van de veilige grenzen (berijdbare gebieden) van voertuigbewegingen, voornamelijk het verdelen van voertuigen, gewone bermen, stoepranden, zichtbare grenzen zonder obstakels en onbekende grenzen;
De mogelijkheid om horizontaal bewegende doelen te detecteren, zoals het detecteren en volgen van voetgangers en voertuigen die kruispunten oversteken;
Positionering en kaartcreatie - dat wil zeggen technologie.Hoewel momenteel millimetergolfradar wordt gebruikt, is de technologie volwassener en biedt deze meer toepassingsmogelijkheden;
2) In het automatische aandrijfsysteem is de laserradar vergelijkbaar met de camera, maar de voordelen zijn:
Verkeerslichtherkenning en verkeersbordherkenning
Kostenvoordeel en hoge volwassenheid van algoritmen en technologieën
Hoog objectherkenningspercentage
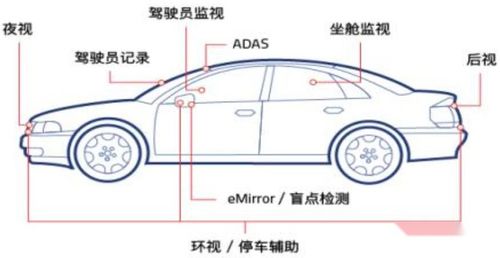
Momenteel zijn de op de auto gemonteerde camera's hoofdzakelijk onderverdeeld in vijf categorieën op basis van hun installatielocatie: camera's aan de voorzijde, camera's rondom, achteruitkijkcamera's, zijcamera's en ingebouwde camera's.
Vooraanzichtcamera: voornamelijk geïnstalleerd op de voorruit om visuele waarnemings- en herkenningsfuncties tijdens het rijden te bereiken.Het kan worden onderverdeeld in een hoofdcamera met vooraanzicht, een smalhoekcamera met een vooraanzicht en een groothoekcamera met een vooraanzicht, afhankelijk van hun functies.
Naar voren gerichte hoofdcamera: Deze camera wordt gebruikt als hoofdcamera in het ADAS-systeem van L2.De gezichtshoeken zijn over het algemeen 30 °, 50 °, 60 °, 100 ° en 120 °, en de detectieafstand bedraagt over het algemeen 150-170 meter.Het uitvoerformaat van de camera.
Vooruitkijkende groothoekcamera: De belangrijkste functie van deze camera is het herkennen van objecten die zich dichtbij bevinden, voornamelijk gebruikt in stedelijke wegomstandigheden, rijden op lage snelheid en andere scènes.De gezichtshoek ligt tussen 120 ° -150 ° en de detectieafstand bedraagt ongeveer 50 meter.Na de grootschalige installatie van de 8MP-lens in volgende voertuigen is deze camera niet meer nodig.
Vooraanzicht smalhoekcamera: De belangrijkste functie van deze camera is het herkennen van doelen zoals verkeerslichten en voetgangers.Over het algemeen worden lenzen met een smalle hoek gebruikt en kunnen lenzen van ongeveer 30-40 ° worden geselecteerd.En de pixels van deze lens zijn over het algemeen dezelfde als die van de hoofdcamera aan de voorzijde.De camera neemt een smalle hoek aan, heeft een hogere pixeldichtheid en een grotere detectieafstand, en kan over het algemeen tot 250 meter of zelfs langere afstanden detecteren.
Na het installeren van een 8MP-camera kan het gezichtsveld van de hoofdcamera aan de voorkant 120 ° bereiken, wat misschien niet meer nodig is.De detectieafstand bedraagt circa 60 meter.
Surroundcamera: voornamelijk geïnstalleerd rond de carrosserie van het voertuig, meestal met behulp van 4-8 camera's, die kunnen worden onderverdeeld in naar voren gerichte fisheye-camera, naar links gerichte fisheye-camera, naar rechts gerichte fisheye-camera en naar achteren gerichte fisheye-camera.Gebruikt voor het weergeven van panoramische panoramische zichtfuncties, evenals visuele perceptie en objectdetectie met geïntegreerde parkeerfunctie;De veelgebruikte kleurenmatrix is omdat er behoefte is aan kleurherstel.
Achteruitkijkcamera: meestal geïnstalleerd op de kofferbak, voornamelijk voor parkeerhulp.De gezichtshoek ligt tussen de 120 en 140 graden en de detectieafstand bedraagt circa 50 meter.
Zijaanzichtcamera: geïnstalleerd op de B-stijl of achteruitkijkspiegel van het voertuig, de gezichtshoek van deze camera bedraagt over het algemeen 90 ° -100 ° en de detectieafstand bedraagt ongeveer 80 meter.De belangrijkste functie van deze camera is het detecteren van zijdelingse voertuigen en fietsen.
Zij- en achteruitkijkcamera: meestal geïnstalleerd op het voorspatbord van het voertuig, de gezichtshoek van deze camera bedraagt over het algemeen ongeveer 90 ° en de detectieafstand is ook ongeveer 80 meter.Het wordt voornamelijk gebruikt voor scènetoepassingen, zoals het wisselen van rijstrook en het invoegen op andere wegen.
Ingebouwde camera: voornamelijk gebruikt om de status van de bestuurder te controleren en vermoeidheidsherinneringen en andere functies te bereiken.
Onder hen is de prijs van voorzichtcamera's relatief hoog en ligt de huidige marktprijs tussen 300 en 500 yuan;De prijzen van andere camera's liggen rond de 150-200 yuan.
Uit het plan kunnen we zien dat alle 8 camera's verband houden met het aandrijfsysteem, dat nauw verwant is aan het puur autonome rijplan dat wordt gepromoot zonder afhankelijk te zijn van LiDAR.Het grootste voordeel van dit plan is de hoge kosteneffectiviteit.Door gebruik te maken van een zeer goedkope zelfontwikkelde camera werd een niveau van autonoom rijden bereikt.
Het grootste voordeel van deze oplossing, waarbij gebruik wordt gemaakt van meerdere camera's, is de sterke schaalbaarheid.In de vroege ontwerpfase moeten de hardwarekosten worden verhoogd, maar in de latere fase is de autonome rijfunctie zeer goed compatibel en schaalbaar.
Via dit sensormodel is een niveau van autonome rijfunctie bereikt met goede ervaringen, waaronder de zeer onderscheidende snelle autonome navigatie (NGP) en parkeerplaatsgeheugen-parkeerfunctie.
De S-Klasse is een vertegenwoordiger van traditionele OEM-oplossingen, en de binoculaire stereocamera-oplossing is het grootste voordeel van de Mercedes-Benz S-Klasse.Vergeleken met monoculaire camera's kunnen binoculaire camera's de beweging van het huidige gedetecteerde doel in de X-, Y- en Z-coördinaten berekenen, de houding en het type van het gedetecteerde doel bepalen, en het ervaringseffect van de ADAS-functie van Mercedes Benz op L2-niveau is ook beter dan de andere twee.
Bij de analyse van cameraoplossingen voor in massa geproduceerde automodellen hebben we ontdekt dat ze allemaal camera's met een midden- tot lage pixelgrootte gebruiken om autonome rijfuncties te realiseren.
Saitemei Security Electronics Co., Ltd. Autocamera-industrieketen
De keten van de autocamera-industrie omvat hoofdzakelijk drie belangrijke schakels: upstream-materialen, midstream-componenten en downstream-producten.
Stroomopwaartse materialen zoals optische lenzen, filters en beschermende films worden gebruikt om lenssamenstellen te vervaardigen, terwijl wafers worden gebruikt om CMOS-chips en DSP-signaalprocessors te vervaardigen;Monteer de midstream-lensconstructie, CMOS-chips en lijmmaterialen in modules en verpak ze met DSP-signaalprocessors in cameraproducten.
Op dit niveau van de industriële keten kunnen upstream-leveranciers al complete cameraproducten leveren aan downstream-klanten van voertuigen of eerstelijnsleveranciers.In de autocamera-industrie vormen camera's en software-algoritmen samen een autocamera-oplossing, die wordt toegepast op autonome voertuigen.
Momenteel zijn de bedrijven met een groot marktaandeel op de markt voor autocamera's allemaal leidende mondiale leveranciers van eerstelijnscomponenten, en de downstream-klanten omvatten in principe grote mondiale autobedrijven.
CMOS heeft de hoogste prijs-kwaliteitverhouding onder autocamera's, namelijk 52%;Moduleverpakkingen zijn goed voor 20% en optische lenzen voor 19%.
CMOS-chip
CMOS (CIS-sensor) is de mainstream lichtgevoelige componentoplossing voor camera's in auto's.Vergeleken met lichtgevoelige CCD-componenten heeft CMOS een iets inferieure beeldkwaliteit, maar het is goedkoop en energiezuiniger, waardoor het algemeen de voorkeur geniet op het gebied van autocamera's met lage pixelvereisten.
Basisstructuur van beeldsensoren
De beeldsensor is vanaf het uiterlijk verdeeld in een lichtgevoelig gebied (Firecore), verbindingsdraden, binnencircuit en substraat.Het lichtgevoelige gebied is een enkele pixelarray die is samengesteld uit meerdere afzonderlijke pixelpunten.Wanneer de uit elke pixel verkregen lichtsignalen worden samengevoegd, vormen ze een compleet beeld.
Doorsnedediagram van CMOS-chip
Vanwege de verschillende lichthoeken die elke afzonderlijke pixel binnenkomen, wordt een microlens op het oppervlak van elke afzonderlijke pixel toegevoegd om de lichthoek te corrigeren, waardoor het licht verticaal het oppervlak van het lichtgevoelige element kan binnendringen.Dit is het concept van een chip, die binnen een klein afwijkingsbereik van de lens moet worden gehouden
Wat de circuitarchitectuur betreft, integreren we een beeldsensor als een donkere doos die lichtsignalen omzet in elektrische signalen.De externe componenten van de donkere doos omvatten doorgaans stroom-, data-, klok-, communicatie-, besturings- en synchronisatiecircuits.Het kan eenvoudigweg worden opgevat als de Firecore die lichtsignalen omzet in elektrische signalen, die worden verwerkt en gecodeerd door het logische circuit in de donkere doos, en vervolgens worden uitgevoerd via een data-interface.
Omdat het ontwerpproces van de pixellaag in CMOS-chips vergelijkbaar is met analoge chips, worden er hoge eisen gesteld aan productieprocessen
Belangrijkste leveranciers.
De productie- en productietechnologie van CMOS is hoogstaand, en vanuit mondiaal marktperspectief wordt deze momenteel voornamelijk bezet door door het buitenland gefinancierde ondernemingen.Vanuit het perspectief van het concurrentielandschap bekleedt Saitemei de eerste plaats met een marktaandeel van 36%, op de voet gevolgd door het binnenlandse bedrijf Huoxin Technology met een marktaandeel van 22%.Mondiale leveranciers zijn goed voor ruim 65%, met een hoge industriële concentratie.Binnenlandse onderneming Saitemei Security Electronics Co., Ltd. is een toonaangevende onderneming op dit gebied geworden.

 Uw bericht moet tussen de 20-3.000 tekens bevatten!
Uw bericht moet tussen de 20-3.000 tekens bevatten!